
知を、繋ぐ
北海道大学
産学・地域協働推進機構

PRESS RELEASE
研究発表-
 2024.04.19DigitalBlast、宇宙での植物栽培に向け北海道大学 藤田知道研究室との共同研究開始 擬似的な弱重力環境で植物を栽培、ゲノムレベルでの変化を探る(理学研究院 教授 藤田知道)(PDF)
2024.04.19DigitalBlast、宇宙での植物栽培に向け北海道大学 藤田知道研究室との共同研究開始 擬似的な弱重力環境で植物を栽培、ゲノムレベルでの変化を探る(理学研究院 教授 藤田知道)(PDF) -
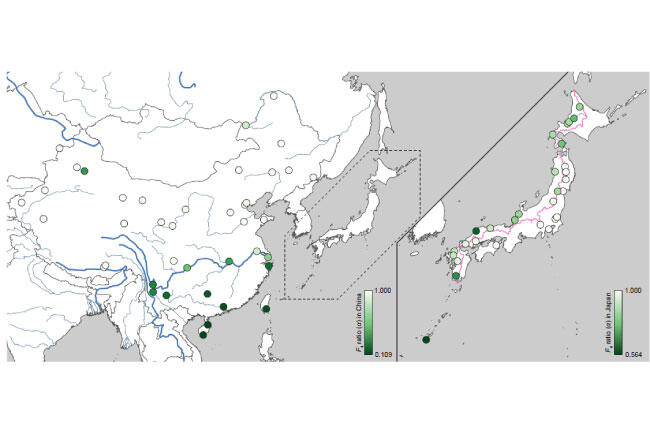 2024.04.19東アジアのハツカネズミが明かす進化の秘密~亜種間交雑によるゲノム進化のメカニズムを解明~(情報科学研究院 准教授 長田直樹)
2024.04.19東アジアのハツカネズミが明かす進化の秘密~亜種間交雑によるゲノム進化のメカニズムを解明~(情報科学研究院 准教授 長田直樹) -
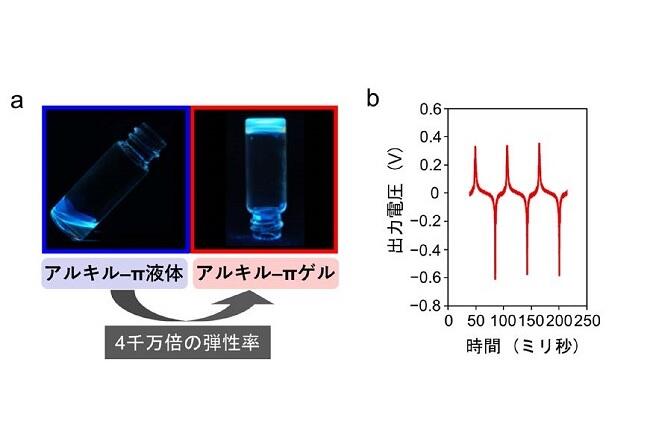 2024.04.18発電するゲル「ゲル-エレクトレット」の創成に成功~軽量で柔軟な運動センサとしてウェアラブルヘルスケア応用に期待~(先端生命科学研究院 客員教授 中西尚志)(PDF)
2024.04.18発電するゲル「ゲル-エレクトレット」の創成に成功~軽量で柔軟な運動センサとしてウェアラブルヘルスケア応用に期待~(先端生命科学研究院 客員教授 中西尚志)(PDF) -
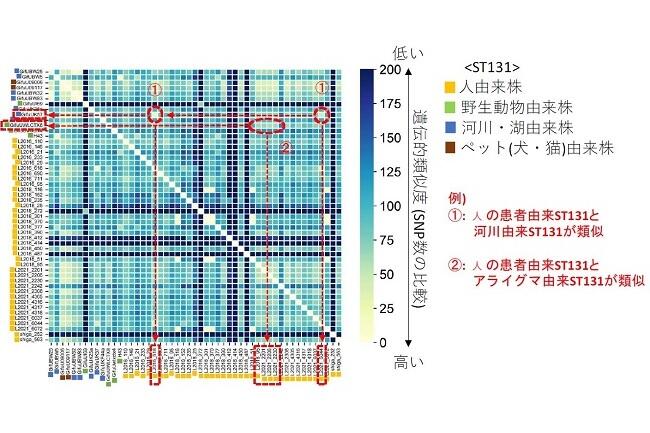 2024.04.17人社会から自然環境へ薬剤耐性菌が拡散の可能性 ~パンデミッククローンが野生動物・水系環境からも分離~(獣医学研究院 准教授 佐藤豊孝)
2024.04.17人社会から自然環境へ薬剤耐性菌が拡散の可能性 ~パンデミッククローンが野生動物・水系環境からも分離~(獣医学研究院 准教授 佐藤豊孝) -
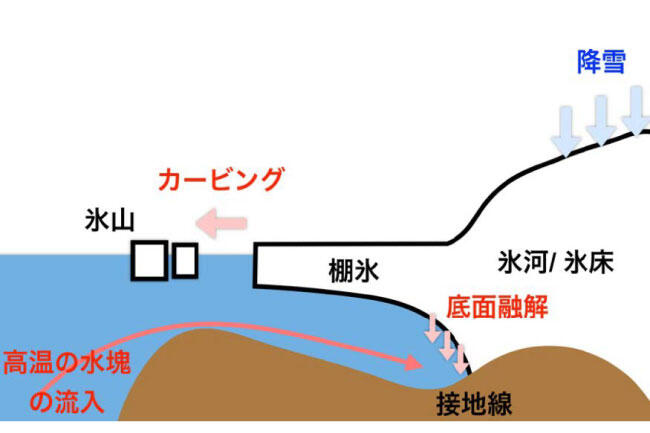 2024.04.12海洋の渦状循環が温かい海水を湧昇させ棚氷を融かす~世界の脅威となっている南極棚氷の融解に新仮説~(低温科学研究所 助教 中山佳洋)
2024.04.12海洋の渦状循環が温かい海水を湧昇させ棚氷を融かす~世界の脅威となっている南極棚氷の融解に新仮説~(低温科学研究所 助教 中山佳洋) -
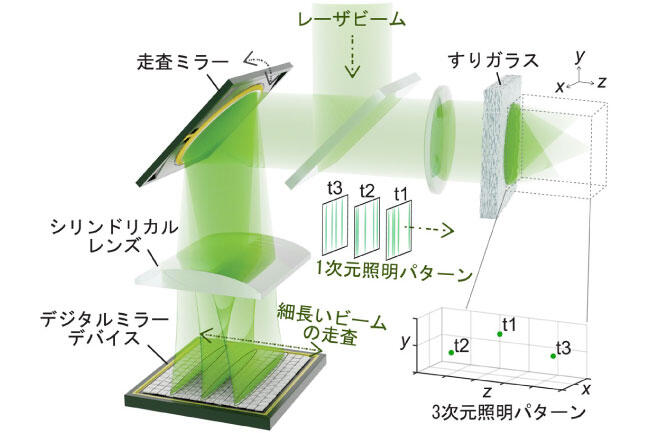 2024.04.09超高速の光パターン照明手法を開発~次世代光産業、光科学の基盤的手法として期待~(電子科学研究所 教授 三上秀治、准教授 渋川敦史)
2024.04.09超高速の光パターン照明手法を開発~次世代光産業、光科学の基盤的手法として期待~(電子科学研究所 教授 三上秀治、准教授 渋川敦史) -
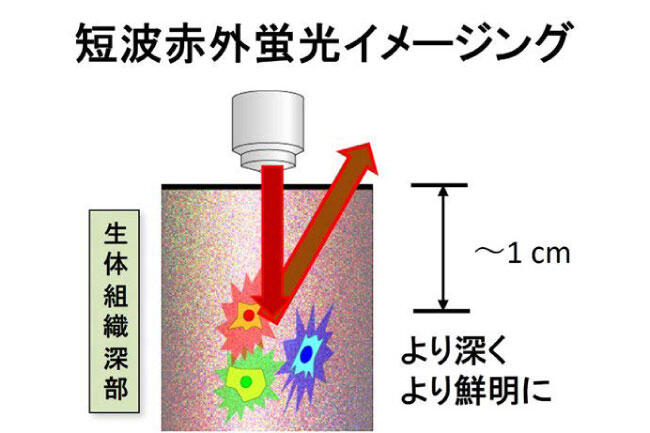 2024.04.08ガン診断に未踏の波長を利用~医療応用が可能な安全性の高い短波赤外蛍光色素を開発~(先端生命科学研究院 教授 門出健次)
2024.04.08ガン診断に未踏の波長を利用~医療応用が可能な安全性の高い短波赤外蛍光色素を開発~(先端生命科学研究院 教授 門出健次) -
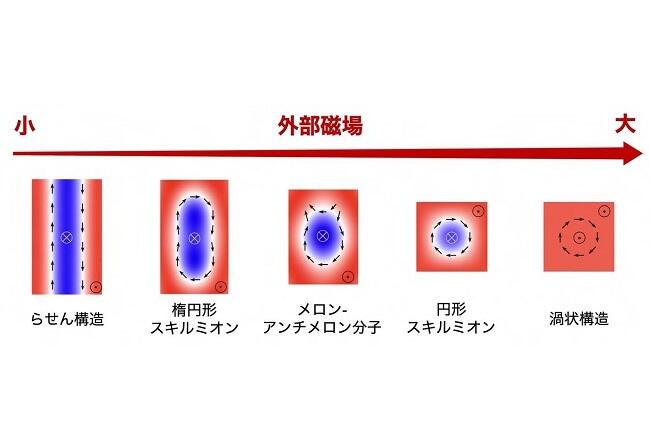 2024.04.02多彩なスピン構造の間のトポロジカル数スイッチングに成功――超高密度な新しい情報担体としての活用に期待――(理学研究院 准教授 速水 賢)(PDF)
2024.04.02多彩なスピン構造の間のトポロジカル数スイッチングに成功――超高密度な新しい情報担体としての活用に期待――(理学研究院 准教授 速水 賢)(PDF)
TOPICS
トピックス- すべて
- お知らせ
- 新着シーズ
- 受賞
- メールマガジン
-
2024.04.12新着シーズ注目シーズを更新しました!「 プレスリリースを行った研究者のシーズ(2024年1月~3月)」
-
2024.04.04お知らせスタートアップ・エコシステム共創プログラム GAPファンド(STEP1)研究開発課題の募集について
-
2024.04.01北大ブランド通信産地直送 北大ブランド通信vol.30 ~新商品のご紹介「北大クラークラスク」~
-
2024.03.28メールマガジンvol.75_4月開催イベント_きたキッチン 北海道フェア、公開講座「STARTUP HOKKAIDO連携講義 社会課題を読み解き未来を生き抜くフューチャースキルを育てよう」等のご紹介
-
2024.03.26お知らせ産学・地域協働推進機構 事務補佐員の募集について(一部更新 再掲載)
-
2024.03.22お知らせ産学・地域協働推進機構 産学協働マネージャー(特任教員)の募集について
-
2024.04.04お知らせスタートアップ・エコシステム共創プログラム GAPファンド(STEP1)研究開発課題の募集について
-
2024.03.26お知らせ産学・地域協働推進機構 事務補佐員の募集について(一部更新 再掲載)
-
2024.03.22お知らせ産学・地域協働推進機構 産学協働マネージャー(特任教員)の募集について
-
2024.02.28お知らせ産学・地域協働推進機構 産学協働マネージャー(特定専門職員)の募集について
-
2024.02.28お知らせ産学・地域協働推進機構 事務補佐員の募集について
-
2024.02.01お知らせ産学連携により社会実装が実現(北大大学病院 髙橋大介講師―日本人に合う人工股関節の開発)
-
2023.11.29お知らせ社会共創部産学連携課 事務補佐員の募集について
-
2023.11.28お知らせ広域エリア統合プレインキュベーション拠点 「HX(エイチクロス)」 法人会員受付開始のご案内
-
2023.11.14お知らせ安全保障・研究インテグリティ担当教員(産学連携推進本部)の公募について
-
2023.11.06お知らせ【テレビ放送】テレビ朝日「朝メシまで。」に北大ガゴメが紹介されます
-
2024.04.12新着シーズ注目シーズを更新しました!「 プレスリリースを行った研究者のシーズ(2024年1月~3月)」
-
2020.07.16新着シーズ北大の技術紹介(動画)~企業に観ていただきたい注目の研究~
-
2021.03.22受賞北海道大学COI『食と健康の達人』拠点が第3回日本オープンイノベーション大賞 日本学術会議会長賞を受賞しました
-
2020.07.10受賞樋泉 実 客員教授が放送批評懇談会 第11回志賀信夫賞を受賞しました
-
2024.03.28メールマガジンvol.75_4月開催イベント_きたキッチン 北海道フェア、公開講座「STARTUP HOKKAIDO連携講義 社会課題を読み解き未来を生き抜くフューチャースキルを育てよう」等のご紹介
-
2024.02.27メールマガジンvol.74_3月開催イベント_北海道最大級の小中高生成果報告、4大学+1企業アグリ食品セミナー、知的財産国際シンポジウム等のご紹介
-
2024.01.29メールマガジンvol.73_2月開催イベント_アントレクエスト(旭川)、地域コミュニティを活性化するコワーキングの裏技イベント等のご紹介
-
2023.12.25メールマガジンvol.72_1月開催イベント_nano tech 2024、オアソビプロジェクト、2023年下半期 新着シーズ等のご紹介
-
2023.11.29メールマガジンvol.71_12月開催イベント__チャレンジピッツァ ~ピザ屋さんの経営を通じてビジネス・SDGsを学ぼう~、emmyfes. in 東京2023等のご紹介
-
2023.10.27メールマガジンvol.70_11月開催イベント_ビジネスEXPO、アントレクエスト、るるぶキッチン等のご紹介等のご紹介
-
2023.09.29メールマガジンvol.69_10月開催イベント_ 新技術説明会、social innovation X等のご紹介
-
2023.08.31メールマガジンvol.68_9月開催イベント_2023特許・情報フェア&コンファレンス、北大北キャンパスシンポジウム等のご紹介
-
2023.07.28メールマガジンvol.67_8月開催イベント_建築家・安藤忠雄氏 講演会、スポーツで学ぶアントレプレナーシップ等のご紹介
-
2023.06.29メールマガジンvol.66_7-8月開催のイベントについてのご紹介
-
2024.04.01北大ブランド通信産地直送 北大ブランド通信vol.30 ~新商品のご紹介「北大クラークラスク」~
-
2024.03.01北大ブランド通信産地直送 北大ブランド通信vol.29 ~「北大ガゴメ®」新商品のご紹介~
-
2024.01.25北大ブランド通信産地直送 北大ブランド通信vol.28 ~北大短角牛を味わえるお店~
-
2023.12.26北大ブランド通信産地直送 北大ブランド通信vol.27 ~北大の食材を使ったメニューの紹介~
-
2023.12.01北大ブランド通信産地直送 北大ブランド通信vol.26~北大ラズベリー® 待望の商品化~
-
2023.10.24北大ブランド通信産地直送 北大ブランド通信 vol.25~ホームカミングデー2023” をふり返って~
-
2023.09.22北大ブランド通信産地直送 北大ブランド通信 vol.24~ユニクロとのコラボレーション“UTme!”のご紹介~
-
2023.08.23北大ブランド通信産地直送 北大ブランド通信vol.23~新商品“北大完熟ハスカップゼリー”のご紹介 ~
-
2023.08.09北大ブランド通信産地直送 北大ブランド通信 vol.22~ 「緑のビアテラス」と新商品“Boy’s, be ambitious.” グッズのご紹介 ~
-
2023.06.29北大ブランド通信産地直送 北大ブランド通信 vol.21~ 新たな認定商品 北大トラウト ~


BUSINESS SUPPORT
企業サポート









法人会員受付開始のご案内